
显微输精管吻合和输精管附睾吻合技术为男性不育的治疗开辟了新窗口,手术效果不断地改善。显微外科手术操作极其精细,要求术者尽可能大的稳定和尽可能少的抖动,医用机器人(da Vinci Surgical Robot)的应用为这个问题带来了理想的解决手段。1985年Kwho等首次报道利用机器人辅助脑部手术。自1989年Davies等首次将机器人应用于泌尿外科手术后,机器人手术广泛开展,包括前列腺癌、膀胱癌、肾癌、肾盂输尿管连接处狭窄、肾下垂等手术,借助da Vinci system均能顺利完成,且大大缩短了手术时间,医生操作起来更舒适,手术视野更清晰立体,手术效果优于传统手术。由Philip S.Li和Goldstein等首次完成的一项关于医用机器人的大样本随机动物对照试验表明,应用机器人在大鼠身上完成显微外科输精管吻合术和输精管附睾吻合术,与经由熟练显微外科医生完成的同类手术比较,在复通率相当(机器人组100%,传统组90%)的情况下,明显地缩短了手术时间(输精管吻合术组68.5/102.5分钟,输精管附睾吻合组90.3/107.3分钟),减少了精子囊肿发生率(输精管吻合术组27%/70%,输精管附睾吻合组42%/50%)。不仅如此,医用机器人技术进一步整合计算机以及通讯技术,在未来的10到20年甚至可以让熟练的显微外科医生远程施行显微外科手术。
手术适应证:同显微输精管吻合术和显微输精管附睾吻合术。
【术前准备】
- 医用机器人(da Vinci Surgical Robot)的适应和训练,即传统显微技术转化为机器人显微操作,循序渐进熟练控制操作臂、缝针、缝线及各种精细操作。
- 余同显微输精管吻合术和显微输精管附睾吻合术。
【体位与麻醉】腰麻和硬脊膜外联合麻醉,仰卧位。
【手术方法和步骤】
- 医用机器人(da Vinci Surgical Robot)的适应与训练。要求循序渐进、由易到难,熟练控制操作臂,手脚协调,适应3D视野立体效果的空间感,用操作臂熟练控制缝针、缝线,不弄断、弄弯缝针,熟练打结缝合。完成传统显微技术转化为机器人显微操作技术(图4-5-1)。
- 其余操作同显微输精管吻合术和显微输精管附睾吻合术。
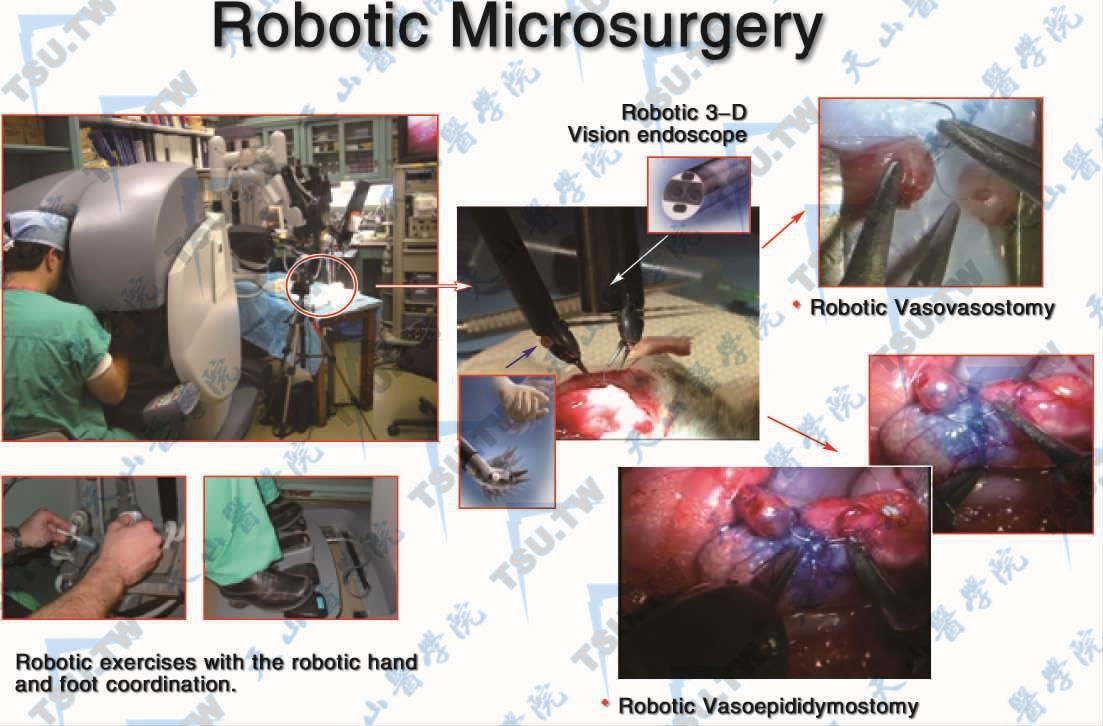
图4-5-1 机器人显微手术
【术中要点与注意事项】
- 要有熟练的传统显微输精管吻合术和显微输精管附睾吻合术经验作为基础。
- 医用机器人(da Vinci Surgical Robot)的适应与训练,先在模型上操作,再进行动物实验,直至熟练将传统显微技术转化为机器人显微操作技术。
【术后处理】同传统显微输精管吻合术和显微输精管附睾吻合术。
【并发症及防治】同传统显微输精管吻合术和显微输精管附睾吻合术,但并发症发生率减少,手术效果更佳。
【点评】
显微外科手术操作精细,尤其是显微输精管吻合和输精管附睾吻合技术,对稳定性及准确性要求很高。医用机器人(da Vinci Surgical Robot)理想地满足显微手术的要求,借助多个操作臂,确保稳定性、灵活性,且完全没有抖动,还有极佳的视野。在有熟练传统显微输精管吻合术和显微输精管附睾吻合术经验的前提下,通过严格培训和反复练习,显微手术者完全可以适应机器人设备和机器人手术中缺乏触觉反馈的缺陷。并且随着机器人设备和技术的不断发展改进,机器人显微输精管吻合或输精管附睾吻合术必将进一步得到推广应用。
(庄锦涛 高勇 涂响安)
参考文献
- 王玲珑,杨嗣星主编.显微泌尿外科学.北京:科学出版社,2002,203-212
- 张朝佑主编.人体解剖学.第2版.北京:人民卫生出版社,1998,531-543
- 吴宏飞主编.精道外科学.南京:东南大学出版社,2008,13-22
- 吴阶平主编.吴阶平泌尿外科学.济南:山东科学技术出版社,2004,67-71
- Stahl PJ,Stember DS,Goldstein M.Contemporary management of male infertility.Annu Rev Med,2012,63:525-540.
- Mirilas P,Mentessidou A.Microsurgical subinguinal varicocelectomy in children,adolescents,and adults:surgical anatomy and anatomically justified technique.J Androl,2012,33(3):338-349..
- Jee SH,Hong YK.One-layer vasovasostomy:microsurgical versus loupe-assisted.Fertil Steril,2010,94 (6):2308-2311.
- 郭应禄主编.男科学.北京:人民卫生出版社,2004.
- 刘继红主编.男科手术学.北京:北京科学技术出版社,2006,171-175.
- 泌尿外科手术图谱.第2版.关志忱,译.北京:人民出版社,2005,367-374.
- Li PS,Dong Q,Goldstein M.Microsurgical approaches to the treatment of obstructive azoospermia.Zhonghua Nan Ke Xue,2004,10(9):643-650.
- Tu XA,Zhao L,Zhao LY,et al.Microsurgical vasovasostomy for the treatment of intractable chronic scrotal pain after vasectomy.Asian J Androl.2013 Jul 8.doi:10.1038/aja.2013.76.
- Martin E,Carnett JB,Levi JV,et al.The surgical treatment of sterility due to obstruction at the epididymis;together with a study of the morphology of human spermatozoa.Univ Pa Med Bull,1902,15 (1):2-15.
- Lespinasse V.Obstructive sterility in the male.JAMA,1918,70:448.
- Silber SJ.Microscopic vasoepididymostomy:specific microanastomosis to the epididymal tubule.Fertil Steril,1978,30(5):565-571.
- Wagenknecht LV,Klosterhalfen H,Schirren C.Microsurgery in andrologic urology.I.Refertilization.J Microsurg,1980,1(5):370-376.
- Thomas AJ.Vasoepididymostomy.Urol Clin North Am,1987,14(3):527-538.
- Berger RE.Triangulation end-to-side vasoepididymostomy.J Urol,1998,159(6):1951-1953.
- Marmar JL.Modified vasoepididymostomy with simultaneous double needle placement,tubulotomy and tubular invagination.J Urol,2000,163(2):483-486.
- Chan PT,Li PS,Goldstein M.Microsurgical vasoepididymostomy:a prospective randomized study of 3 intussusception techniques in rats.J Urol,2003,169(5):1924-1929.
- Monoski MA,Schiff J,Li PS,et al.Innovative single-armed suture technique for microsurgical vasoepididymostomy.Urology,2007,69(4):800-804.
- Zhao L,Deng CH,Sun XZ,et al.A modified single-armed technique for microsurgical vasoepididymostomy.Asian J Androl,2013,15(1):79-82.
- 赵亮,涂响安,陈羽等.单针缝线纵向两针套叠显微输精管附睾吻合术17例分析.中华显微外科杂志,2013,36(3):281-283.
- 刘继红主编.男科手术学.北京:北京科学技术出版社,2006,166-168.
- Wein,A.J等原著,郭应禄等主译.坎贝尔-沃尔什泌尿外科学.第9版.北京:北京大学医学出版社,2009,1140-1141.
- Karaman A,Afsarlar CE,Arda N.Epididymal cyst:not always a benign condition.Int J Urol,2013,20(4):457-458.
- Kauffman EC,Kim HH,Tanrikut C,et al.Microsurgical spermatocelectomy:technique and outcomes of a novel surgical approach.J Urol,2011,185(1):238-242.
- Rioja J,Sanchez-Margallo FM,Uson J,et al.Adult hydrocele and spermatocele.Bju Int,2011,107(11):1852-1864.
- Kwoh YS,Hou J,Jonckheere EA,et al.A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery.IEEE Trans Biomed Eng,1988,35(2):153-160.
- Davies BL,Hibberd RD,Coptcoat MJ,et al.A surgeon robot prostatectomy--a laboratory evaluation.J Med Eng Technol,1989,13(6):273-277.
- Schiff J,Li PS,Goldstein M.Robotic microsurgical vasovasostomy and vasoepididymostomy:a prospective randomized study in a rat model.J Urol,2004,171(4):1720-1725.
- Schiff J,Li PS,Goldstein M.Robotic microsurgical vasovasostomy and vasoepididymostomy in rats.Int J Med Robot,2005,1(2):122-126.
- Parekattil SJ,Cohen MS.Robotic surgery in male infertility and chronic orchialgia.Curr Opin Urol,2010,20(1):75-79.
